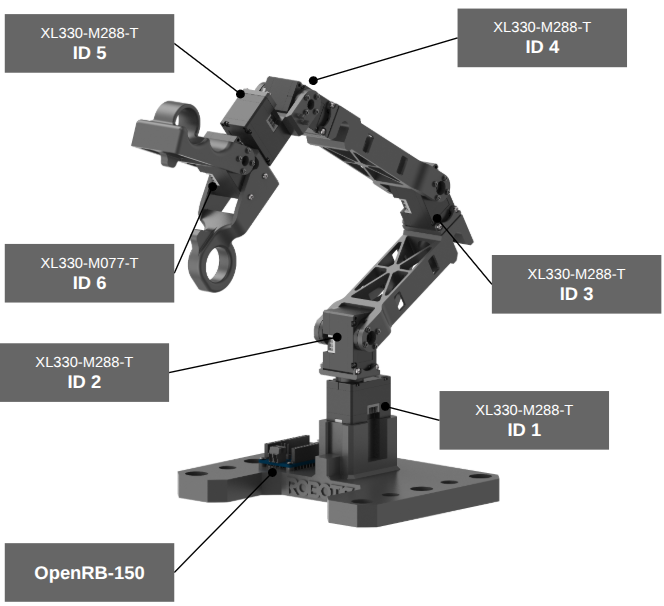
⚙️ Không cần thiết lập động cơ
Tất cả các thông số động cơ đều được cấu hình sẵn tại nhà máy—không cần thiết lập phần cứng hoặc phần mềm. Bạn có thể kết nối ngay lập tức và bắt đầu sử dụng cánh tay robot mà không cần chuẩn bị thêm.
🔌 Không cần hiệu chuẩn
Mỗi bộ truyền động DYNAMIXEL đều được hiệu chuẩn tại nhà máy, vì vậy người dùng không bao giờ cần tự thực hiện hiệu chuẩn. Cả phần cứng và phần mềm đều được hỗ trợ đầy đủ, mang đến trải nghiệm cắm và chạy thực sự, ngay cả khi sử dụng LeRobot.
🛡️ Khởi động an toàn về vị trí ban đầu
Cánh tay robot có thể an toàn trở về vị trí ban đầu từ bất kỳ vị trí nào trong quá trình khởi động. Điều này đảm bảo hoạt động ổn định, dễ dự đoán và giảm thiểu rủi ro, ngay cả đối với người dùng lần đầu.
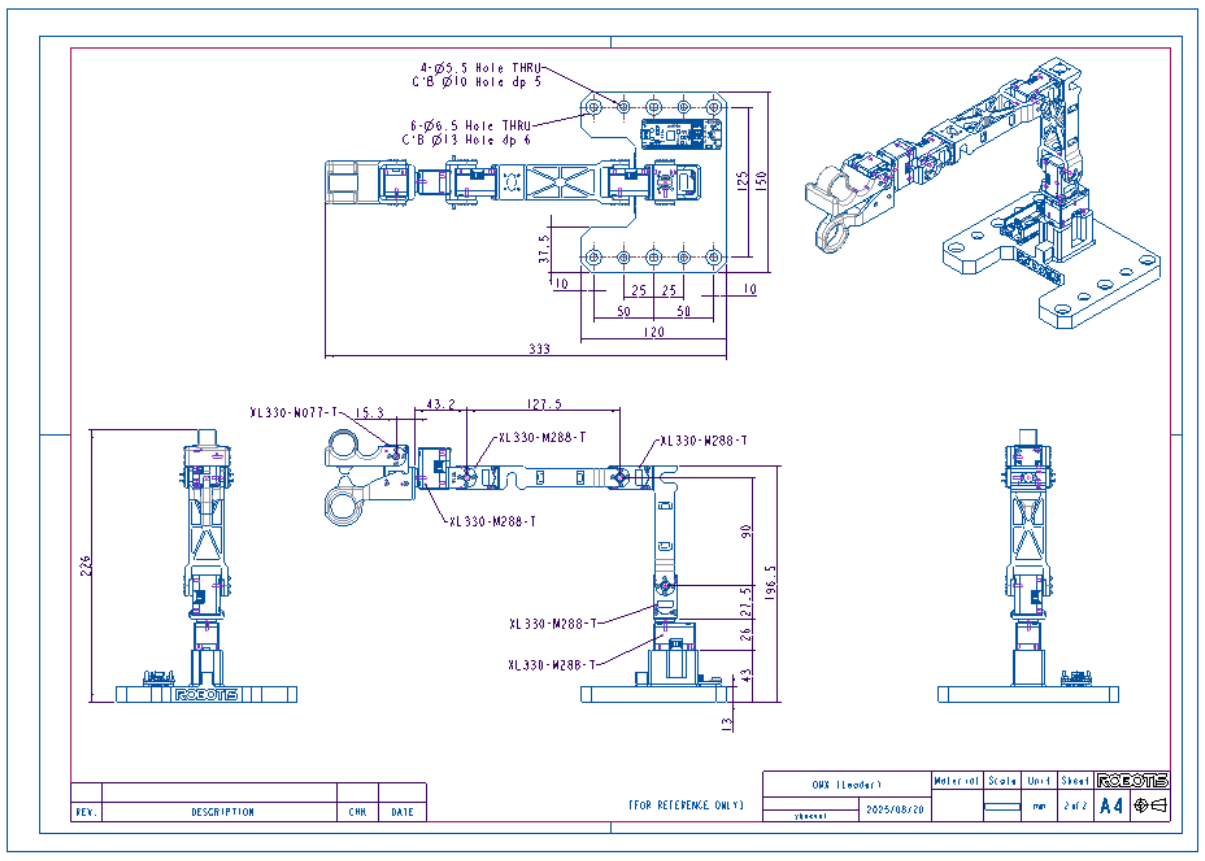
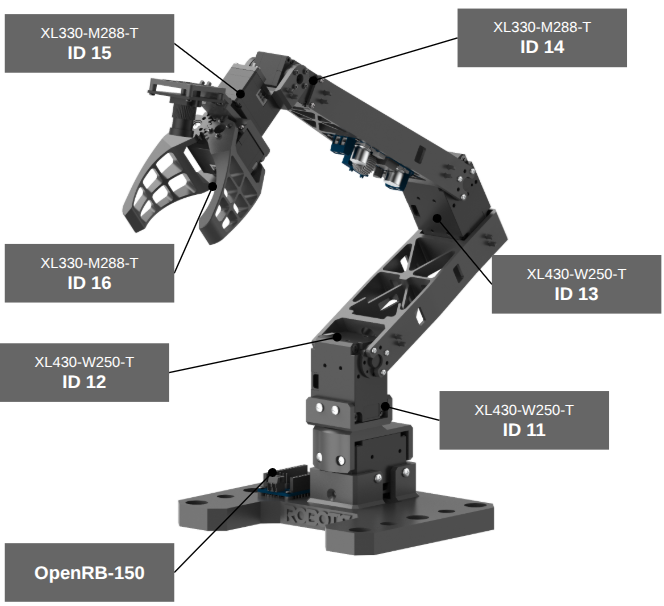
🧭 Xoay đế 360°
Động cơ đế sử dụng thiết kế vị trí mở rộng, cung cấp khả năng xoay 360° hoàn toàn.
Với cáp mở rộng, nó có thể xoay vô hạn—mở rộng không gian làm việc hữu ích để thao tác linh hoạt hơn. 🪶 Trọng lượng nhẹ OMX được thiết kế cực kỳ nhẹ, cho phép dễ dàng mang theo và triển khai ở bất cứ đâu. Trọng lượng giảm cũng đồng nghĩa với việc ít mệt mỏi hơn khi sử dụng trong thời gian dài mà vẫn duy trì hiệu suất mạnh mẽ.
✨ Bộ điều khiển ma sát thấp
Thiết kế ma sát thấp đặc biệt giúp bộ điều khiển hoạt động trơn tru và dễ dàng. Ngay cả trẻ em cũng có thể điều khiển một cách an toàn, và các chuyển động nhỏ diễn ra tự nhiên với nỗ lực tối thiểu.
🔋 Không cần nguồn điện cho bộ điều khiển (OMX-L)
Không giống như các cánh tay robot thông thường, bộ điều khiển hoạt động chỉ với một kết nối USB-C duy nhất. Điều này cho phép sử dụng máy tính xách tay đơn giản để mô phỏng hoặc thử nghiệm nhanh mà không cần nguồn điện bên ngoài.
🎯 Cơ chế kích hoạt lò xo
Cơ chế điều khiển hỗ trợ lò xo cung cấp khả năng cầm nắm thoải mái và lặp lại. Người dùng trải nghiệm phản hồi xúc giác nhất quán, giúp các phiên thu thập dữ liệu dài dễ dàng hơn và ít mệt mỏi hơn.
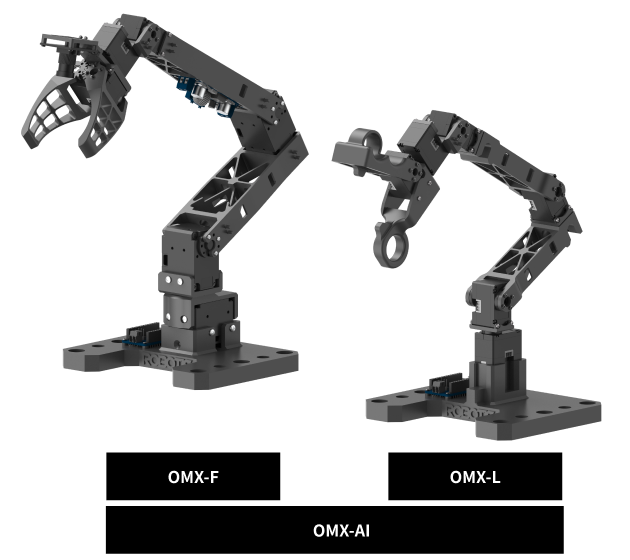
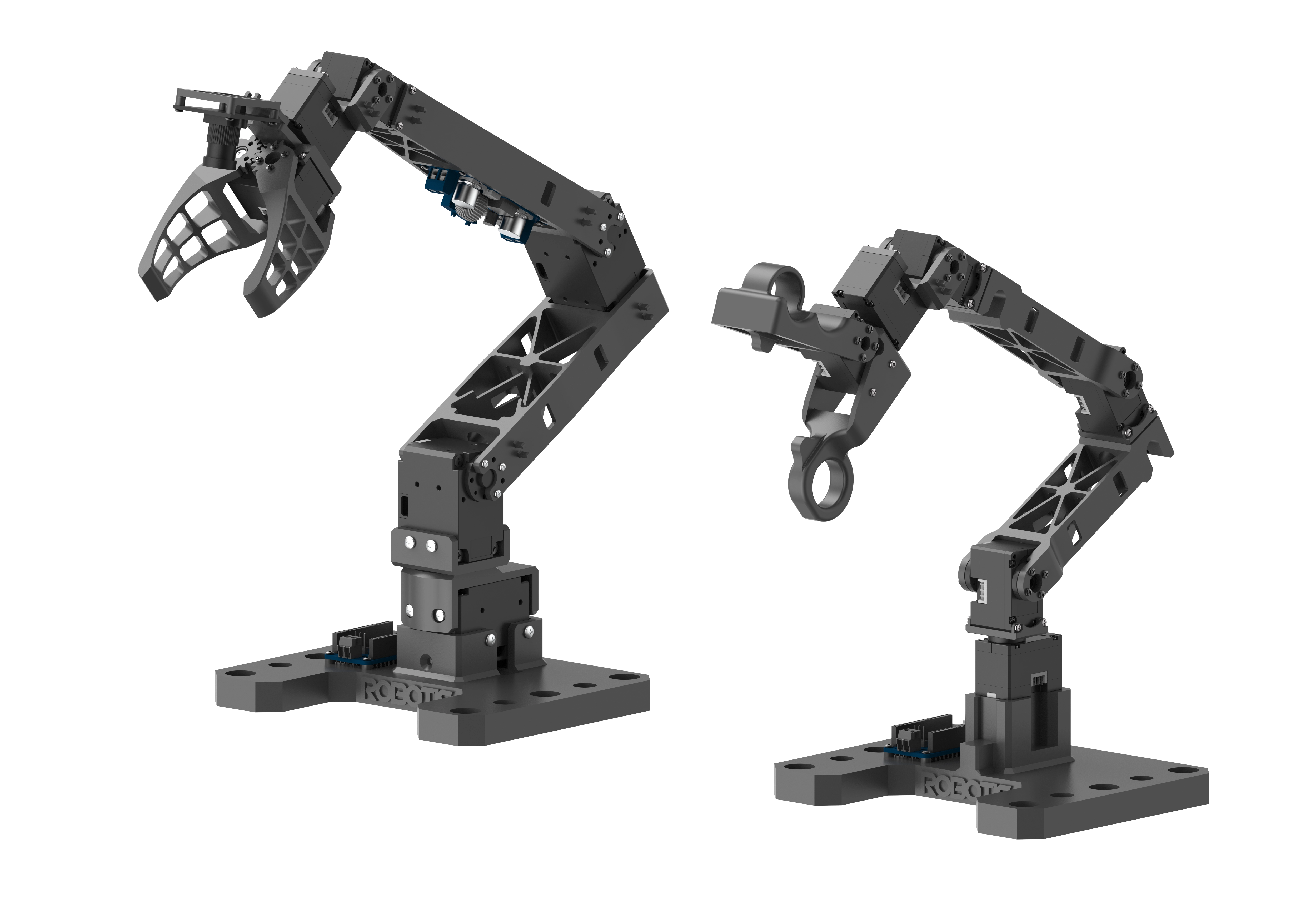
🎛️ Thiết kế hướng đến người dùng
Những chi tiết được cân nhắc kỹ lưỡng giúp cải thiện hiệu suất thực tế, từ thiết kế kẹp mở giúp giảm sự che khuất đến điểm gốc rõ ràng cho các tư thế ban đầu. Các tính năng này đảm bảo dữ liệu nhất quán, khả năng gắn nhãn tốt hơn và khả năng tái tạo kết quả giữa các phiên.
🤖 Tích hợp ROS 2
OMX chính thức hỗ trợ ROS 2, với khả năng tương thích với các gói phần mềm hiện có. Các nhà phát triển có thể tích hợp với các ngăn xếp phần mềm dựa trên ROS 2 để mở khóa các chức năng robot tiên tiến.
🔄 Quy trình làm việc AI
Hoàn toàn tương thích với ROBOTIS Physical AI Tools và các quy trình làm việc gốc của LeRobot. Người dùng có thể chọn một trong hai môi trường và dễ dàng xây dựng nhiều ứng dụng dựa trên AI ngay từ đầu.