





















New
ROBOTIS OMX-AI
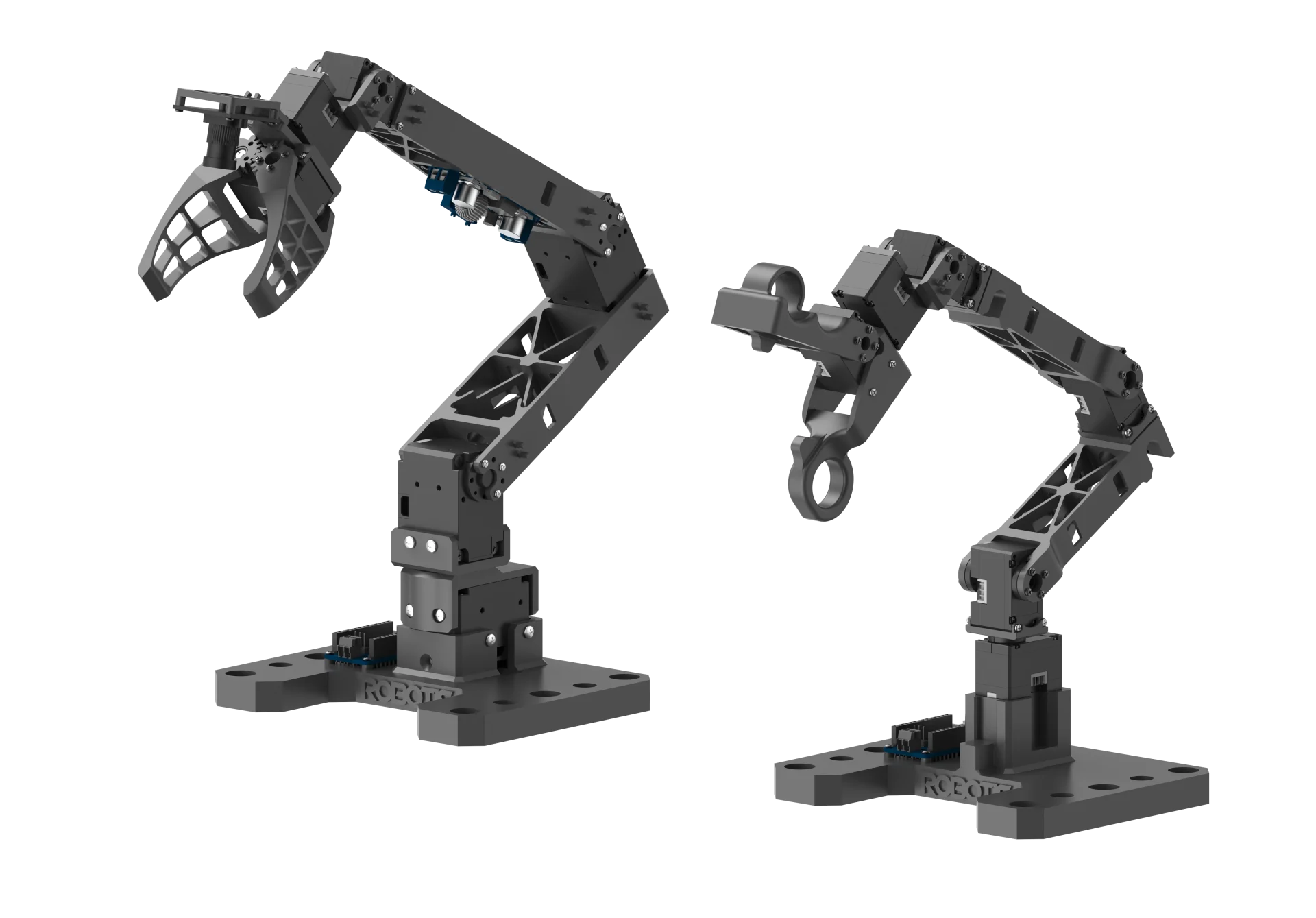
ROBOTIS OMX là một cánh tay robot 5 bậc tự do được thiết kế cho nghiên cứu Trí tuệ Nhân tạo Vật lý trong thế giới thực. Nó hỗ trợ điều khiển từ xa, học quỹ đạo và triển khai các chính sách AI thông qua kiến trúc điều khiển ROS 2 thống nhất. Nền tảng này chạy trên ROS 2 Jazzy và sử dụng khung ros2_control để điều khiển cấp độ khớp theo thời gian thực. Cánh tay được điều khiển bởi các bộ truyền động dòng DYNAMIXEL-X được kết nối qua TTL bằng cách sử dụng SDK của Dynamixel.
Hệ thống này được thiết kế cho:
- Thu thập dữ liệu chuyển động thông qua điều khiển từ xa
- Huấn luyện và kiểm tra các mô hình AI dựa trên quỹ đạo
- Chạy các quỹ đạo đã học hoặc được xác định trước trên phần cứng thực
18.000.000 ₫
Xem thêm








