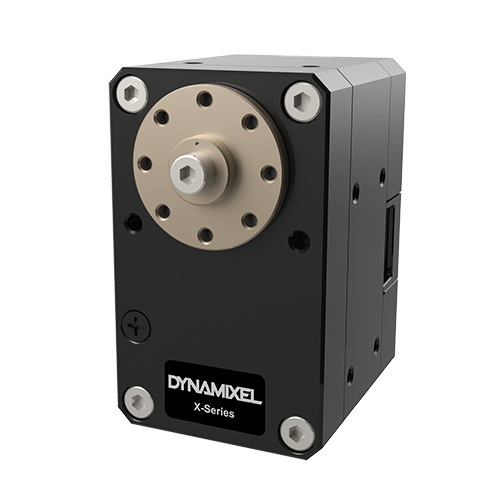





Bộ truyền động Dynamixel XM540-W270-T: kết quả tốt nhất về mô-men xoắn
Động cơ servo XM540-W270-T nổi bật so với các mẫu thuộc dòng Dynamixel X nhờ mô-men xoắn hãm rất mạnh mẽ là 10.6 Nm (mặc dù chỉ nặng 165 g). Điều này đặc biệt thú vị cho tất cả các dự án robot của bạn được thiết kế để mang tải trọng nặng hoặc khám phá địa hình khó khăn.
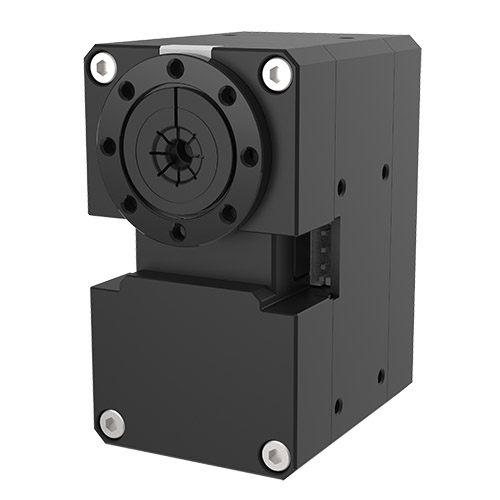
Nhỏ gọn như các mẫu khác trong cùng dòng sản phẩm (cao dưới 6 cm và rộng chỉ 3,35 cm), nó có kết nối TTL, rất tiết kiệm năng lượng và bao gồm một vỏ được cải tiến giúp tản nhiệt tốt hơn. Nhờ vào động cơ chất lượng cao và việc lựa chọn vật liệu phù hợp, servo này vừa đáng tin cậy vừa bền bỉ.
Một servo Robotis mà bạn có thể điều khiển từ A đến Z
Robotis đã phát triển một loạt các servo hoàn toàn có thể lập trình mà bạn có thể điều khiển ở mọi khía cạnh. PWM, vị trí, mức tiêu thụ, nhiệt độ, tốc độ… Servo này cung cấp phản hồi toàn diện, như mọi khi. Sáu chế độ điều khiển có sẵn: mô-men xoắn, vị trí, vận tốc, vị trí mở rộng, vị trí dựa trên dòng điện và PWM. Nó cũng bao gồm một bộ điều khiển PID, một bộ điều chỉnh phổ biến được sử dụng trong các ứng dụng công nghiệp.
Nói tóm lại, bạn sẽ có một servo sẵn sàng trong mọi trường hợp, từ tạo mẫu đến robot thi đấu, điều hướng tự động hoặc cánh tay robot. Bộ truyền động Dynamixel XM540-W270-T thích ứng tốt trong môi trường lớp học cũng như trong phòng thí nghiệm nghiên cứu, hoặc để phát triển các giải pháp quy trình tự động.