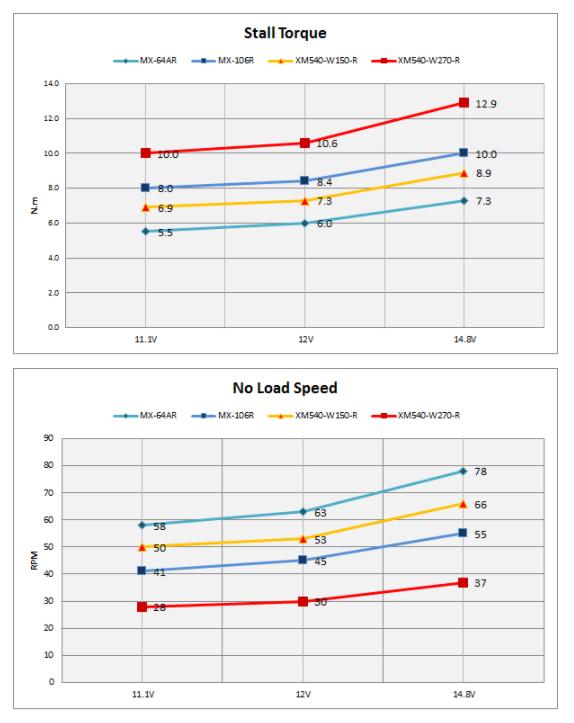





Bộ truyền động Dynamixel XM540-W150-R: nhanh và chính xác
Với tốc độ không tải 53 vòng/phút ở 12V, servo XM540-W150-R là một trong những servo nhanh nhất trong dòng sản phẩm của Robotis. Nó cung cấp 6 chế độ hoạt động:
-
Chế độ điều khiển dòng điện
-
Chế độ điều khiển vận tốc
-
Chế độ điều khiển vị trí (0-360°)
-
Chế độ điều khiển vị trí mở rộng (đa vòng)
-
Chế độ điều khiển vị trí dựa trên dòng điện
-
Chế độ điều khiển PWM
Nó cũng cung cấp phản hồi toàn diện: trạng thái sạc, vị trí, tốc độ, nhiệt độ, dòng điện, quỹ đạo, điện áp đầu vào, v.v. Bạn sẽ đánh giá cao những tính năng này nếu bạn đang tìm kiếm các servo chất lượng để trang bị cho robot có các khớp phức tạp.
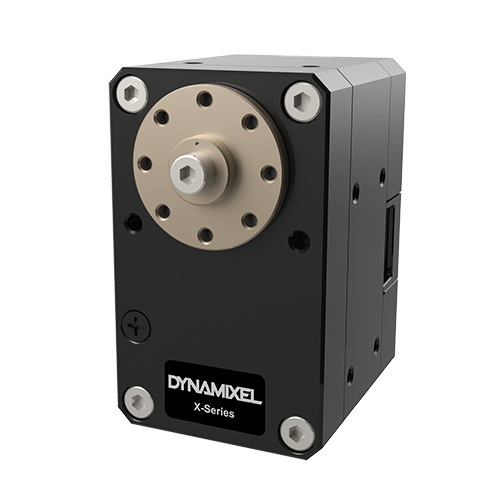
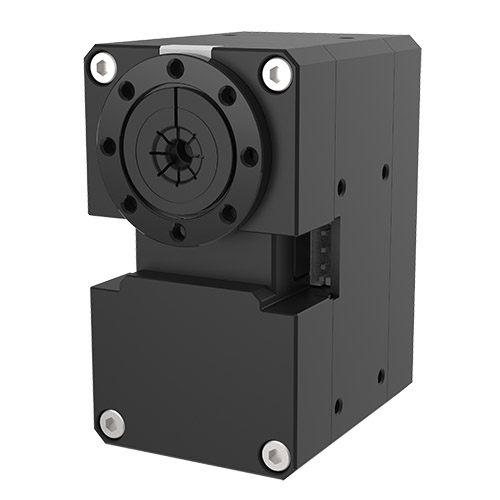
Nhiều tùy chọn lắp đặt
Về mặt phần cứng, dòng servo Dynamixel mới này có nhiều ưu điểm: vỏ bằng nhôm giúp tản nhiệt tốt hơn, một nắp ở đáy vỏ để giảm thiểu lực căng cáp và nhiều tùy chọn đi dây để lắp ráp tiện dụng hơn.