











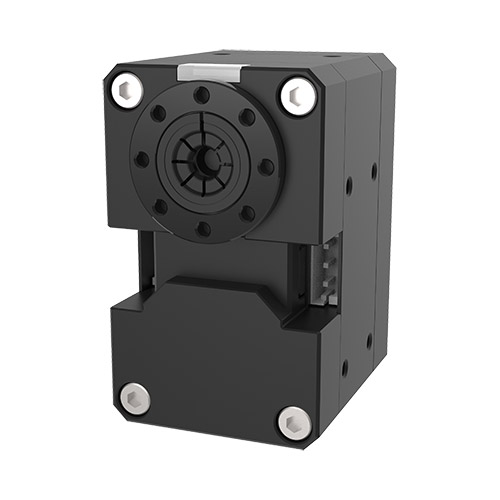






Bộ truyền động XM430-W350-T: một servo linh hoạt cho mọi sáng tạo của bạn
Với tất cả các tính năng này và hiệu suất thú vị được cung cấp, XM430-W350-T được thiết kế để phù hợp với nhiều tùy chọn lắp đặt. Bạn có thể sử dụng servo của mình trên robot di động, bàn tay có khớp nối hoặc phương tiện điều khiển từ xa, tùy theo tâm trạng của bạn.
Mẫu XM430-W350, được bán ở đây với giao diện TTL, cũng có sẵn với giao diện RS485 trên trang web của ROBOHUB.
Servo Dynamixel bao gồm nhiều tính năng có giá trị cho những người đam mê robot và các nhà nghiên cứu hoặc giáo viên, trong một thiết bị duy nhất. Servo Dynamixel XM430-W350-T cung cấp nhiều khả năng với:
-
Điều khiển mô-men xoắn, vận tốc, vị trí và quỹ đạo, bao gồm cả chế độ PWM, điều này sẽ làm hài lòng những người hâm mộ các phương tiện điều khiển bằng sóng vô tuyến;
-
Một cách kết nối cáp mới (ở phía sau) để giảm ma sát;
-
Nhiều tùy chọn phần cứng khác nhau để thực hiện tất cả các dự án của bạn;
-
Một tản nhiệt bằng nhôm.














