





Bộ truyền động Dynamixel XM430: một MX-28 thế hệ mới
Mặc dù các servo Dynamixel trong dòng XM430 tỏ ra kém mạnh mẽ hơn một chút so với các servo MX-106, nhưng chúng vẫn là một cải tiến đáng kể so với dòng MX-28.
Chúng mạnh mẽ hơn và nhanh hơn, và trên hết là tiết kiệm năng lượng hơn nhiều ở mức 40 mA so với 100 mA của các phiên bản tiền nhiệm. Bạn sẽ tăng đáng kể khả năng tự chủ của robot của mình. Điều đáng chú ý là thiết bị cấp nguồn cho XM430 cũng giống như cho MX-28.
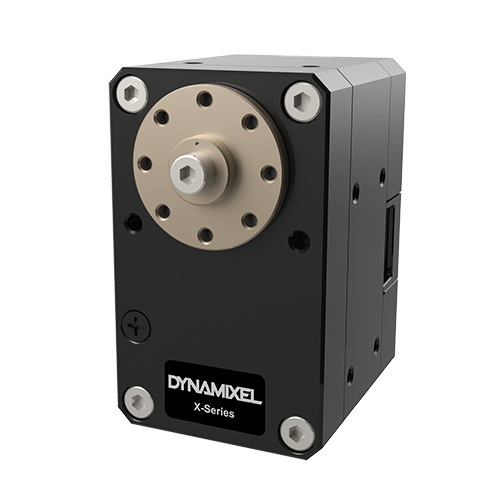
Về mặt công thái học, servo XM430-W350-R nhỏ gọn hơn một chút so với MX-28. Thiết kế mới cũng mang lại một điểm cộng nhỏ, vì các dây cáp được kết nối trực tiếp với động cơ và được khóa bằng một nắp đậy, loại bỏ mọi nguy cơ dây bị lỏng.

Bộ truyền động XM430-W350-R: kiểm soát tốt hơn về tốc độ, quỹ đạo, mô-men xoắn…
…và hơn thế nữa! Dòng servo Dynamixel mới bao gồm các tính năng mới thú vị cho những người đam mê robot:
-
Điều khiển mô-men xoắn: một trong những ưu điểm chính của dòng XM430. Nó sử dụng phép đo dòng điện để có được một dòng công suất mong muốn liên tục.
-
Điều khiển PWM: Dynamixel đã mở ra cánh cửa cho PWM, đây là một tin tuyệt vời cho những người hâm mộ các phương tiện điều khiển bằng sóng vô tuyến vì mô-men xoắn và tốc độ đầu ra có thể được kiểm soát hiệu quả hơn trên các robot di động.
-
Điều khiển quỹ đạo: bốn loại quỹ đạo hiện có thể thực hiện được nhờ vào việc bổ sung các biên dạng gia tốc và tốc độ. Bằng cách kiểm soát hai thông số này, bạn có thể thêm một “hiệu ứng” vào chuyển động của robot.
-
Điều khiển vị trí dựa trên dòng điện: điều khiển vị trí và điều khiển mô-men xoắn có thể được kết hợp để tinh chỉnh các chuyển động của robot.
-
Điều khiển vận tốc và vị trí: không có gì ngạc nhiên ở đây, đây đã là một tính năng của các động cơ servo Robotis trước đó.
-
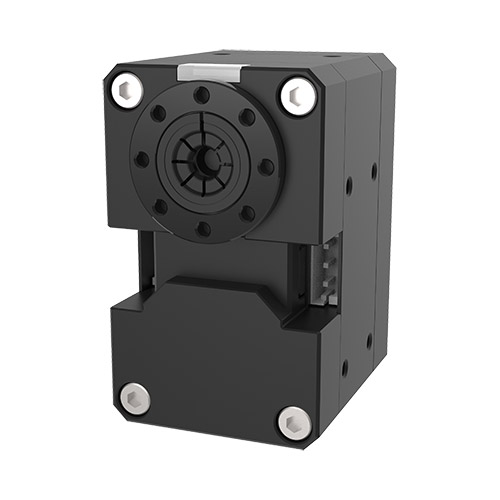
Khả năng cắm cáp ở phía sau, do đó giảm bất kỳ rủi ro nào về việc bị kẹp hoặc mài mòn.
Như bạn có thể thấy, servo robot mới này có những gì cần thiết để đáp ứng không chỉ những người hâm mộ các phương tiện bánh lốp điều khiển bằng sóng vô tuyến mà còn cả những người hâm mộ các robot có khớp nối với cánh tay, bàn tay và móng vuốt.