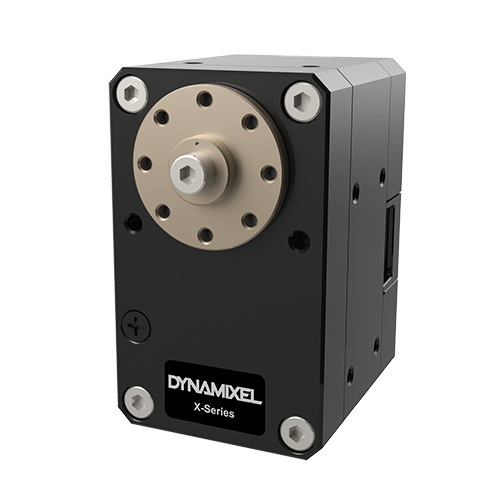






Bộ truyền động DYNAMIXEL XM430-W210-T của Robotis: được tối ưu hóa ở mọi cấp độ
Với công thái học được nâng cấp để giảm căng thẳng cho cáp và tránh các miếng chèn, mức tiêu thụ năng lượng được hợp lý hóa và tản nhiệt bằng nhôm, servo Dynamixel XM430-W210-T sẽ làm hài lòng những người đam mê robot.
Hơn nữa, bạn sẽ có toàn quyền kiểm soát tốc độ, vị trí, mô-men xoắn, quỹ đạo, v.v… Bao gồm cả điều khiển PWM!
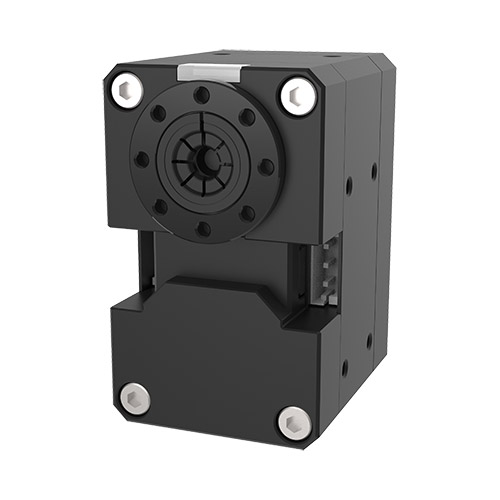
DYNAMIXEL XM430-W210-T : một servo Dynamixel sẵn sàng cho mọi thứ
Phù hợp với tất cả các loại sáng tạo được trang bị các khớp phức tạp (bàn tay có khớp nối, côn trùng robot, robot hình người, v.v.), servo XM430-W210-T cung cấp nhiều tùy chọn lắp đặt, tương thích với rất nhiều bộ phận lắp ráp và nhiều cấu hình kết nối.
Servo linh hoạt, nhẹ và tiết kiệm năng lượng này là sự lựa chọn hoàn hảo cho các robot phức tạp nhất của bạn