











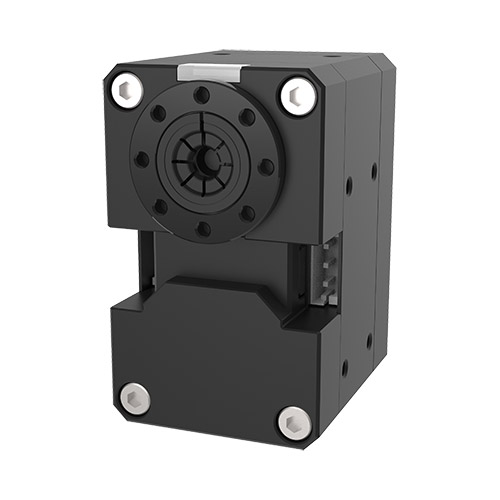








Mạnh mẽ, tiết kiệm, siêu chính xác và điều khiển từ xa: Bộ truyền động XM430-W210-R hoạt động thật tuyệt vời!
Các servo robot Dòng Dynamixel XM-430 thuộc thế hệ servo mới, được điều chỉnh cho cả robot có khớp nối và các phương tiện điều khiển bằng sóng vô tuyến. Với 6 chế độ hoạt động bao gồm điều khiển PWM, vận tốc, mô-men xoắn và quỹ đạo, bạn có thể tinh chỉnh hơn nữa các chuyển động của robot.
Giống như mẫu XM430-W350-R, bộ truyền động XM430-W210-R cung cấp nhiều cải tiến so với dòng Robotis MX-28:
-
Tiết kiệm năng lượng hơn ở mức 40 mA so với 100 mA của các phiên bản tiền nhiệm;
-
Tản nhiệt được cải thiện với vỏ nhôm;
-
Mô-men xoắn được cải thiện trong một kích thước nhỏ gọn hơn;
-
Thiết kế công thái học để tránh các kết nối kém.
-
Có thể cắm cáp ở phía sau, do đó giảm bất kỳ rủi ro nào về việc bị kẹp hoặc mài mòn.

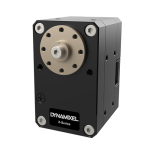
Bộ truyền động Dynamixel XM430-W210-R và XM430-W350-R: có những khác biệt gì?
Dòng Dynamixel XM-430 mới hiện có 2 servo – sự khác biệt giữa chúng là gì? Hãy tập trung vào 4 đặc điểm chính:
-
Mô-men xoắn tối đa khả dụng cao hơn một chút đối với XM430-W350-R;
-
Mô-men xoắn hãm thấp hơn (37,73 kg.cm);
-
Tỷ số truyền thấp hơn; và
-
Tốc độ không tải cũng cao hơn.
Về mặt cung cấp điện, công thái học và các chế độ hoạt động, W210 và W350 cung cấp các đặc điểm tương tự và tương thích với tất cả các nền tảng robot di động hoặc có khớp nối.












