Bộ truyền động Dynamixel XL430-W250-T: một servo nhỏ, hiệu suất cao
Được thiết kế cho người dùng có ngân sách hạn hẹp, động cơ servo Dynamixel XL430-W250-T của Robotis vẫn cung cấp các tính năng chất lượng cao từ dòng Dynamixel X, chẳng hạn như điều khiển vận tốc và vị trí ở 360° với bộ mã hóa từ tính không tiếp xúc. Tiết kiệm năng lượng với thời gian hoạt động được cải thiện, servo nhỏ này sử dụng 40 mA so với 100 mA cho các mẫu trước đó. Nó có cùng cấu trúc cơ khí như XM430 và XH430 và tương thích với các mẫu tương ứng.
Như thường lệ, bạn có thể sử dụng PC của mình (Windows, Mac hoặc Linux) với USB2Dynamixel, đầu nối U2D2 hoặc một bộ vi điều khiển phù hợp để điều khiển servo Dynamixel của bạn (xem bên dưới danh sách các thành phần cần thiết):
-
Bo mạch điều khiển OpenCM9.04-A
-
Bo mạch mở rộng OpenCM 485
-
Bộ sạc SMPS và Dây nguồn cho động cơ servo Dynamixel
-
(hoặc) Pin LBS-10 LiPo 11V cho động cơ servo Dynamixel
Bạn sẽ có thể chọn giữa 6 chế độ hoạt động, sử dụng điều khiển biên dạng và theo dõi các dữ liệu khác nhau như tốc độ, vị trí, quỹ đạo, v.v.
Thiết lập servo Dynamixel của bạn theo ý muốn
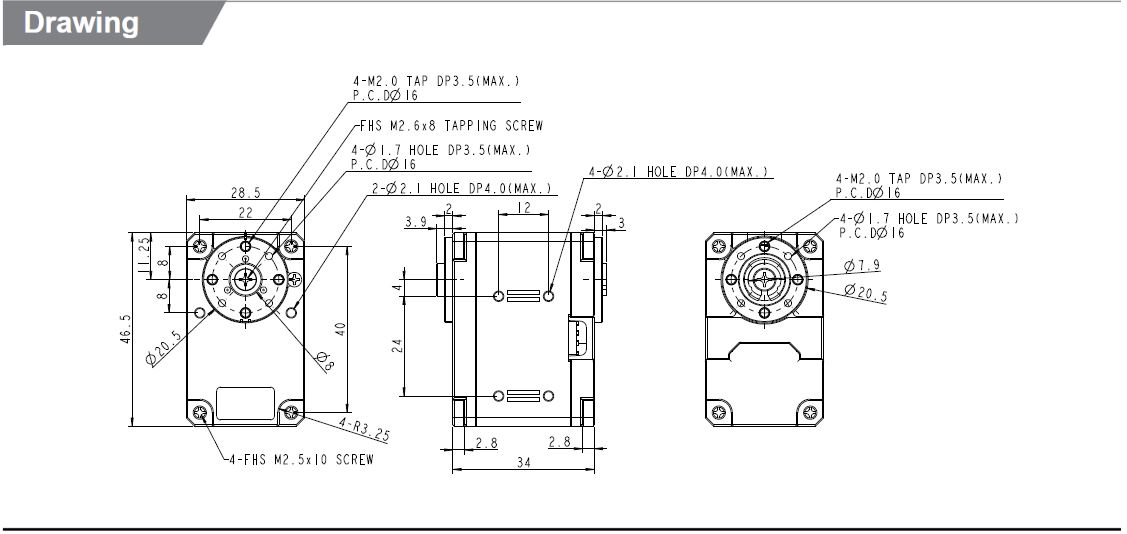
Vỏ sau rỗng của servo Robotis này cung cấp nhiều cấu hình kết nối, vì vậy bạn có thể định vị nó theo cách tốt nhất tùy theo dự án của mình. Các khung có thể được vặn trực tiếp vào vỏ với mức độ phiền phức tối thiểu (không cần đai ốc).