












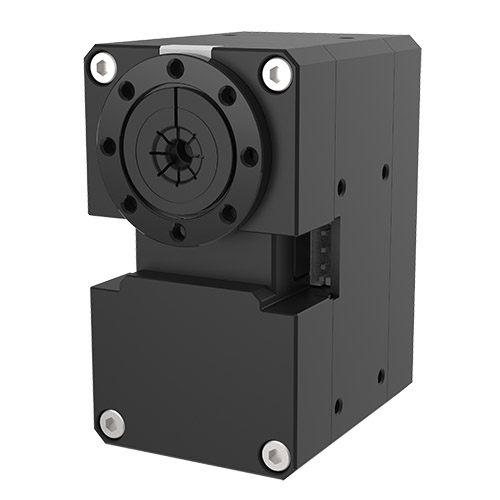





Bộ truyền động Dynamixel XH540-W270-T: một phiên bản TTL mạnh mẽ
Với mô-men xoắn khởi động 9.9 Nm và tỷ số truyền 272.5:1, động cơ servo Dynamixel XH540-W270-T đang khẳng định mình là một trong những bộ truyền động mạnh mẽ nhất trong cùng loại. Tương tự như mẫu XH540-W270-R về hiệu suất, servo này cung cấp giao diện bus đa điểm TTL.
Đặc biệt phù hợp để chế tạo robot di động dùng để khám phá địa hình gồ ghề, servo Dynamixel này còn nổi bật nhờ nhiều khả năng lập trình. Bạn sẽ được hưởng lợi từ 6 chế độ điều khiển, bao gồm cả chế độ PWM, điều này sẽ làm hài lòng những người hâm mộ các phương tiện điều khiển bằng sóng vô tuyến. Bạn có thể kết nối nó trực tiếp với PC bằng mô-đun U2D2 Dynamixel hoặc vi điều khiển Arduino (hoặc bất kỳ bộ điều khiển tương thích nào) nhờ vào cáp JST-Molex được cung cấp.
Động cơ servo dòng Dynamixel XH: chất lượng chế tạo vượt trội
Các servo có thể lập trình trong dòng Dynamixel XH được hưởng lợi từ thiết kế chất lượng cao về nhiều mặt:
-
Đầu nối JST mạ vàng đảm bảo giao tiếp đáng tin cậy và ổn định hơn so với đầu nối Molex;
-
Vỏ bằng kim loại quý và nhựa kỹ thuật mang lại khả năng tản nhiệt rất thỏa đáng;
-
Có thể sắp xếp cáp theo 3 cách khác nhau ở mặt sau của vỏ, và có thể thực hiện nhiều cấu hình lắp ráp nhờ vào một loạt các khung tương thích.













