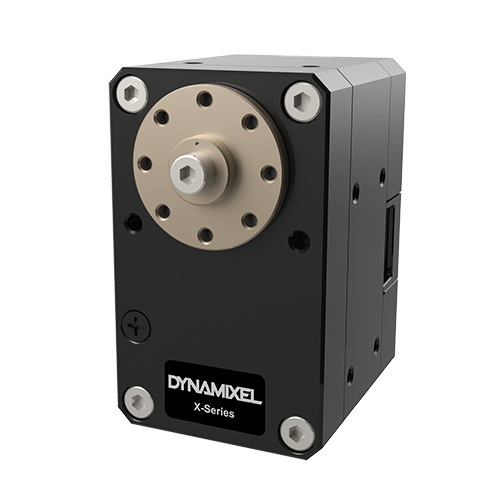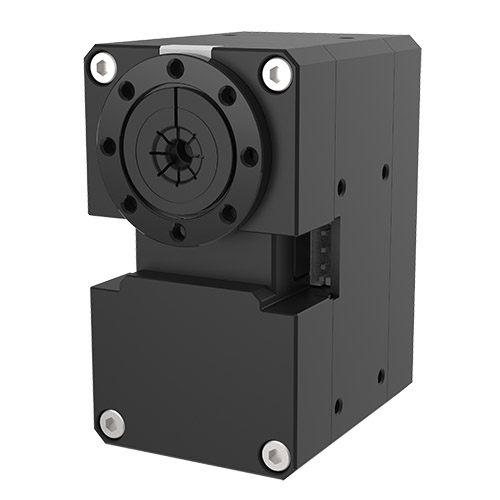





Bộ truyền động Dynamixel XH540-W270-R: tất cả trong một và phù hợp với mọi địa hình Động cơ servo Dynamixel này có tỷ số truyền động 275:1, rất phù hợp cho các thiết bị robot hoạt động trên địa hình khó khăn. Động cơ này chậm hơn so với model XH540-W150-R, nhưng tạo ra mô-men xoắn mạnh mẽ hơn.
Giống như tất cả các servo dòng XH, bạn sẽ được hưởng lợi từ một thiết bị tất cả trong một: bạn chỉ cần kết nối nó với bộ điều khiển hoặc mô-đun USB2Dynamixel và nguồn điện để bắt đầu ngay lập tức. Hoàn toàn có thể lập trình, nó cung cấp khả năng điều khiển mô-men xoắn, vị trí, vận tốc hoặc PWM mở rộng với tổng cộng 6 chế độ hoạt động.
Bạn có thể sử dụng cáp JST-Molex đi kèm để kết nối nó với bộ điều khiển, vì động cơ servo Dynamixel XH540-W270-R có đầu nối tương thích JST mạ vàng, đáng tin cậy hơn nhiều so với đầu nối Molex được sử dụng trong các dòng trước.