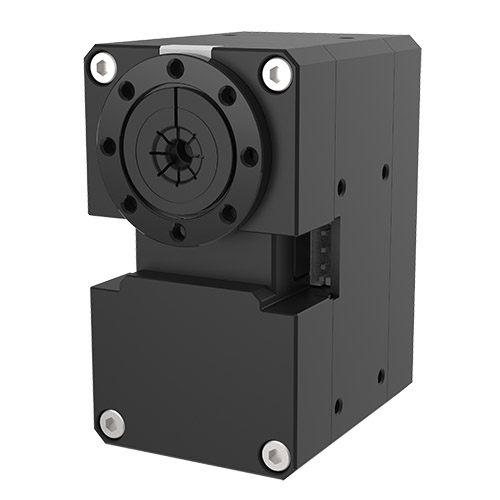





Bộ truyền động Dynamixel XH540-W150-T : giao diện TTL và nhiều chế độ điều khiển có sẵn
Động cơ servo Dynamixel XH540-W150-T cung cấp tất cả các tính năng của dòng XH: động cơ Maxon chất lượng cao, đầu nối JST, vỏ được thiết kế cẩn thận và nhiều cấu hình lắp ráp nhờ vào một loạt phần cứng tương thích.
Servo Dynamixel dòng XH cung cấp 6 chế độ điều khiển giúp bạn nhận biết chính xác nhất các chuyển động của robot, cho dù đó là tay gắp robot, nền tảng gắn trên ray hay robot di động điều khiển từ xa.
Một servo Robotis được trang bị đầy đủ
Bộ truyền động Dynamixel XH540-W150-T tất cả trong một này có mọi thứ bạn cần để lập trình, thiết lập và điều khiển ngay lập tức. Sử dụng mô-đun USB2Dynamixel để lập trình servo của bạn trực tiếp từ máy tính hoặc kết nối nó với bộ điều khiển tương thích (loại Open-CM hoặc Open-CR). Servo đi kèm với cáp JST-Molex để đảm bảo khả năng tương thích của tất cả các kết nối của bạn.
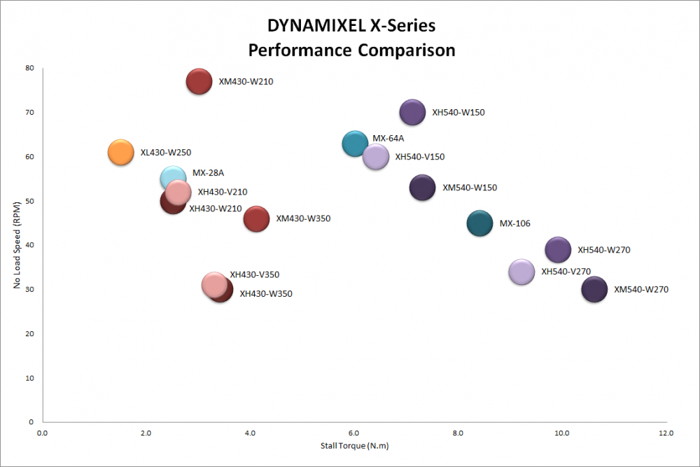
Servo Dynamixel của chúng tôi cung cấp tỷ số truyền xấp xỉ 150:1 với mức tiêu thụ điện năng thấp và tốc độ truyền dữ liệu cao. Nó thuộc dòng servo Dynamixel cao cấp và đứng ngay sau dòng PRO PLUS.