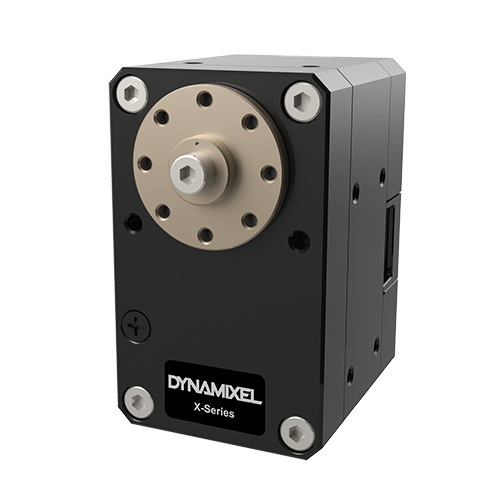





Bộ truyền động Dynamixel XH540-W150-R: động cơ 12V chất lượng cao
Giống như tất cả các servo dòng Robotis XH, mẫu XH540-W150-R bao gồm một động cơ Maxon chất lượng cao, bền bỉ và đáng tin cậy hơn so với thiết bị được lắp đặt trên dòng XM. Động cơ Servo Dynamixel XH540-W150-R không chỉ cung cấp kết nối RS-485 mà còn có khả năng điều khiển tốc độ, vị trí và PWM, với tỷ số truyền xấp xỉ 150:1.
Nó có một đầu nối JST mạ vàng, chất lượng cao hơn so với các đầu nối Molex được sử dụng trong các dòng trước đó. Và vỏ bằng kim loại quý và nhựa kỹ thuật của nó mang lại sự bảo vệ hiệu quả và tản nhiệt thỏa đáng.
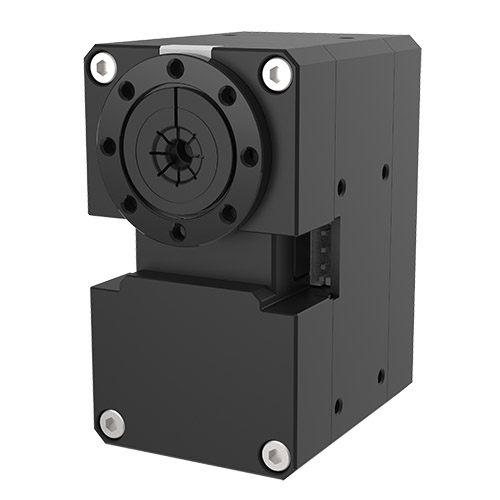
Servo Dynamixel XH: một Dynamixel tất cả trong một
Các servo Robotis Dynamixel này kết hợp một bộ điều khiển, động cơ, hộp giảm tốc, bộ mã hóa gia tăng và bộ mã hóa từ tính trong một thành phần duy nhất. Hệ thống tất cả trong một của nó cho phép bạn lắp ráp servo trên robot của mình mà không cần thêm các mô-đun khác. Tất cả những gì bạn cần là một nguồn điện và một mô-đun giao tiếp. Nó đi kèm với cáp JST-Molex riêng cho phép bạn kết nối servo của mình với bộ điều khiển tương thích hoặc mô-đun U2D2 Dynamixel.
Với dòng Dynamixel XH, bạn có thể kết nối nhiều servo thành một chuỗi để việc lắp ráp gọn gàng hơn nhiều. Bộ chia nguồn RX/EX 6 cổng cho phép bạn cấp nguồn cho tối đa 6 chuỗi servo song song. Thêm vào đó, đây là một servo cung cấp nhiều cấu hình lắp ráp, bao gồm 3 cách bố trí đi dây khác nhau.