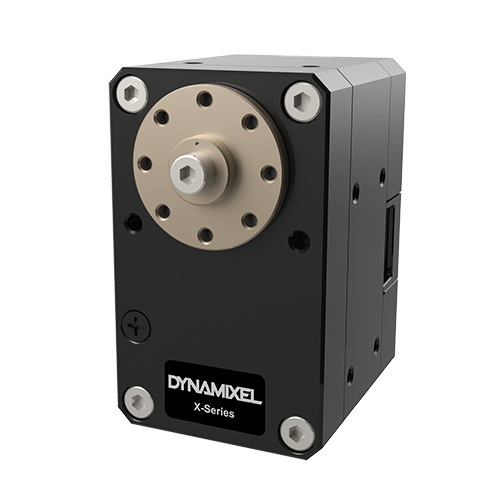





Bộ truyền động Dynamixel XH540-V270-R: 6 chế độ điều khiển vòng kín
Servo Dynamixel này mang lại nhiều lợi thế về độ bền, chất lượng kết nối và quan trọng nhất là khả năng điều khiển. Các chế độ điều khiển vòng kín về vận tốc, vị trí và mô-men xoắn, bao gồm cả chế độ PWM, sẽ làm hài lòng những người đam mê các phương tiện điều khiển bằng sóng vô tuyến.
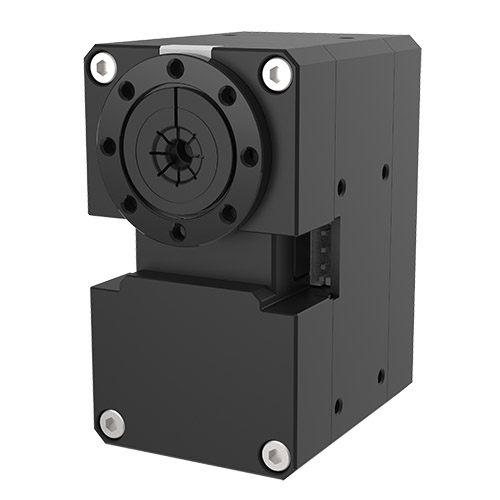
Servo Robotis này bao gồm một động cơ không lõi Maxon, đáng tin cậy hơn so với thiết bị được lắp đặt trên dòng XM. Và vỏ bằng kim loại và nhựa kỹ thuật của nó mang lại khả năng tản nhiệt thỏa đáng, cùng với thiết kế đẹp mắt.
Các servo dòng XH đi kèm với đầu nối JST, đảm bảo giao tiếp đáng tin cậy hơn so với đầu nối Molex. Tuy nhiên, để kết nối servo của bạn với bộ điều khiển OpenCM tương thích hoặc thanh U2D2Dynamixel, bạn có thể sử dụng cáp JST.
Lưu ý khi lắp đặt servo Robotis XH540-V270-R của bạn
Với dòng XH, bạn có thể kết nối nhiều servo thành một chuỗi để việc lắp ráp gọn gàng và dễ dàng hơn nhiều. Hãy đặt cáp JST của bạn một cách cẩn thận để đảm bảo dây không bị rối, điều này có thể làm hỏng cáp. Có ba tùy chọn đi dây, vì vậy bạn có thể chọn phương án tốt nhất cho dự án của mình.

Nếu bạn muốn gắn động cơ servo Dynamixel của mình vào khung, hãy đảm bảo sử dụng một trụ đỡ để vít cố định không làm hỏng khung.