












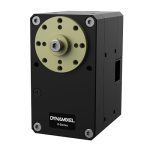





Bộ truyền động Dynamixel XH540-V150-R: 6 chế độ điều khiển, có thể lập trình 100% Động cơ servo Dynamixel này với giao diện RS485 cung cấp nhiều chế độ điều khiển: vận tốc, vị trí, vị trí mở rộng, PWM, v.v.
Nhờ đó, bạn có thể điều chỉnh chính xác để sử dụng cho sáng tạo của mình.
Có thể lập trình hoàn toàn thông qua phần mềm RoboPlus mà bạn có thể tải xuống bên dưới, servo này có thể được kết nối với bộ điều khiển tương thích hoặc đầu nối PC Dynamixel U2D2.
Bạn cũng có thể kết nối nhiều servo trong một chuỗi bằng cáp JST cho các robot phức tạp hơn của mình.
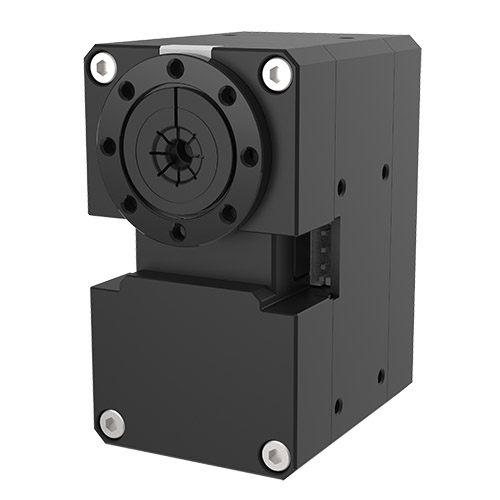
Công thái học được nâng cấp và các tùy chọn lắp đặt Động cơ servo Dynamixel này cũng nổi bật với thiết kế tỉ mỉ. Vỏ ngoài chất lượng cao giúp tản nhiệt hiệu quả.
Hộp số hoàn toàn bằng kim loại. Mẫu XH540-V150-R cung cấp nhiều cấu hình lắp ráp nhờ vào nhiều phần cứng tương thích. Ở mặt sau của hộp, một nắp nâng cấp giúp giảm ma sát và rách khi servo hoạt động: Có 3 tùy chọn dây điện, giúp việc lắp ráp dự án của bạn trở nên dễ dàng hơn.













