









Bộ truyền động XH430-W350-R được trang bị bộ mã hóa từ tính không tiếp xúc cho phép quay 360° với tốc độ lên tới 37 vòng/phút. Nó có khả năng tạo ra mô-men xoắn lên tới 4,2N.m với điện áp 14,8V. Tính năng vượt trội này kết hợp với trọng lượng nhẹ 82g tạo nên một động cơ servo rất hiệu quả cho nhiều lĩnh vực ứng dụng phổ biến.




Chia sẻ




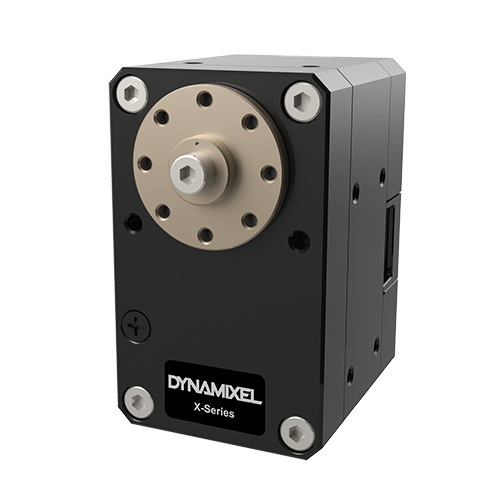
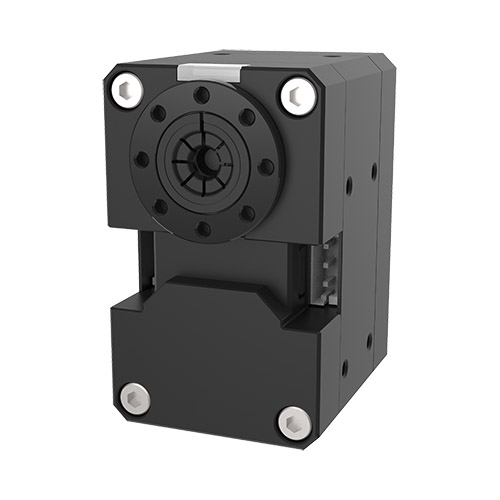
DYNAMIXEL XH430-W350-R
12V / 3.4Nm / 30rpm / RS-485 / Coreless(Maxon)
20.000.000 ₫
Thông tin sản phẩm
Thông số kỹ thuật
-
Tên Model: XH430-W350-R
-
Dòng sản phẩm: DYNAMIXEL X
-
MCU: ARM Cortex-M3 (72 [Mhz], 32 [bit])
-
Điện áp đầu vào:
-
Tối thiểu [V]: 10.0
-
Khuyến nghị [V]: 12.0
-
Tối đa [V]: 14.8
-
-
Đặc tính hiệu suất:
-
Điện áp [V]: 12.0
-
Mô-men xoắn hãm [N·m]: 3.40
-
Dòng điện hãm [A]: 1.3
-
Tốc độ không tải [vòng/phút]: 30.0
-
Dòng điện không tải [A]: 0.07
-
-
Hoạt động liên tục:
-
Điện áp [V]: –
-
Mô-men xoắn [N·m]: –
-
Tốc độ [vòng/phút]: –
-
Dòng điện [A]: –
-
-
Độ phân giải:
-
Độ phân giải [độ/xung]: 0.0879000000
-
Số bước [xung/vòng]: 4,096
-
Góc [độ]: 360
-
-
Cảm biến vị trí: Bộ mã hóa tuyệt đối không tiếp xúc (12 [bit], 360 [độ])
-
Nhà sản xuất: ams(www.ams.com), Mã sản phẩm: AS5045
-
-
Nhiệt độ hoạt động:
-
Tối thiểu [°C]: -5
-
Tối đa [°C]: 80
-
-
Động cơ: Không lõi (Maxon)
-
Tốc độ Baud:
-
Tối thiểu [bps]: 9,600
-
Tối đa [bps]: 4,500,000
-
-
Thuật toán điều khiển: PID
-
Loại bánh răng: Bánh răng trụ thẳng
-
Vật liệu bánh răng: Kim loại
-
Vật liệu vỏ: Kim loại (Mặt trước, Giữa) Nhựa kỹ thuật (Mặt sau)
-
Kích thước (R x C x S) [mm]: 28.5 x 46.5 x 34.0
-
Kích thước (R x C x S) [inch]: 1.12 x 1.83 x 1.34
-
Trọng lượng [g]: 82.00
-
Trọng lượng [oz]: 2.89
-
Tỷ số truyền: 353.5 : 1
-
Độ rơ [phút cung]: –
-
Độ rơ [độ]: –
-
Tín hiệu lệnh: Gói kỹ thuật số
-
Loại giao thức: Giao tiếp nối tiếp không đồng bộ bán song công (8bit, 1 stop, không Parity)
-
Liên kết (Vật lý): Bus đa điểm RS-485
-
ID: 0 ~ 252
-
Phản hồi: Vị trí, Vận tốc, Dòng điện, Dấu thời gian thực, Quỹ đạo, Nhiệt độ, Điện áp, v.v.
-
Phiên bản giao thức:
-
Giao thức 1.0
-
Giao thức 2.0 (Mặc định)
-
-
Chế độ hoạt động / Góc:
-
Chế độ điều khiển dòng điện: Quay vô tận
-
Chế độ điều khiển vận tốc: Quay vô tận
-
Chế độ điều khiển vị trí: 360 [độ]
-
Chế độ điều khiển vị trí mở rộng: ±256 [vòng]
-
Chế độ điều khiển vị trí dựa trên dòng điện: ±256 [vòng]
-
Chế độ điều khiển PWM: Quay vô tận
-
-
Công suất đầu ra [W]: –
-
Dòng điện chờ [mA]: 40
Các thành phần trong gói sản phẩm
| Mục | Số lượng | Mô tả |
| XH430-W350-R | 1 | DYNAMIXEL |
| HN12-N101 | 1 | Khớp nối/sừng tiêu chuẩn cho các mẫu X430 |
| Vòng đệm chịu lực (cho Lắp ráp Khớp nối/sừng) | 1 | Ngăn ma sát giữa khớp nối/sừng và vỏ |
| Cáp Robot-X4P 180mm | 1 | Cáp RS485 4 chân (JST-JST) |
| Cáp Robot-X4P (Chuyển đổi) 180mm | 1 | Cáp RS485 4 chân (MOLEX-JST) |
| Bu lông lục giác WB M2.5×4 | 16 | Dùng để lắp ráp khung (lỗ bên cạnh) |
| Bu lông lục giác WB M2.5×6 | 1 | Dùng để lắp ráp khớp nối/sừng |
| Bu lông lục giác WB M2x3 | 10 | Dùng để lắp ráp khớp nối/sừng & khung |
| Vòng đệm | 8 | Dùng để lắp ráp khung |
Bản vẽ kỹ thuật

Sản phẩm tương thích

Thận trọng
Lắp ráp cáp DYNAMIXEL-X Series qua vỏ rỗng
-
Sắp xếp gọn gàng dây cáp bị rối trước khi lắp vỏ sau.
-
Không lắp vỏ sau khi cáp bị rối. Cáp bị rối có thể bị vỏ máy ép bẹp và gây ra lỗi giao tiếp.
-
Nếu bạn sử dụng hai dây cáp luồn qua vỏ rỗng, các dây cáp sẽ bị hỏng.
-
Chỉ sử dụng một dây cáp luồn qua vỏ rỗng.
Dòng DYNAMIXEL-X đã áp dụng đầu nối JST mạ vàng mới để giao tiếp an toàn và đáng tin cậy.
-
Đầu nối được sử dụng cho DYNAMIXEL trước đây là Molex.
-
Để điều khiển bộ truyền động DYNAMIXEL-X Series qua OpenCM hoặc USB2Dynamixel, vui lòng sử dụng Cáp chuyển đổi JST-Molex đi kèm trong gói sản phẩm.
-
Tuy nhiên, cáp chuyển đổi Molex-JST KHÔNG được bao gồm trong mẫu XL430.
-
Vui lòng mua cáp chuyển đổi khi sử dụng bộ điều khiển và giao diện hỗ trợ đầu nối JST.

Ví dụ cài đặt

SẢN PHẨM LIÊN QUAN







