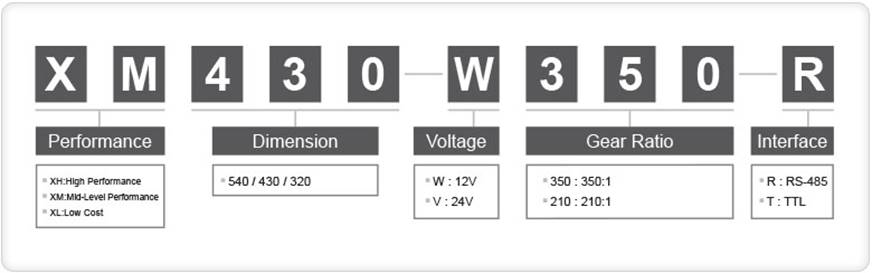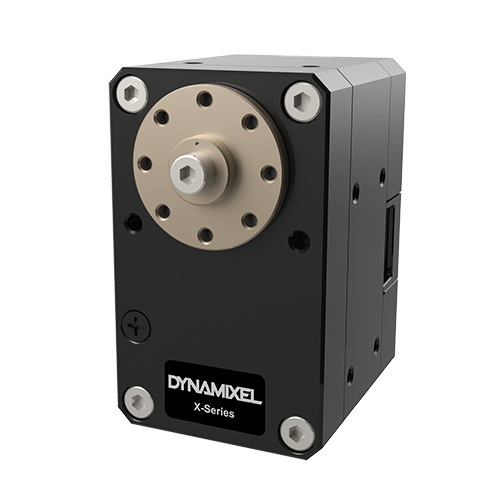


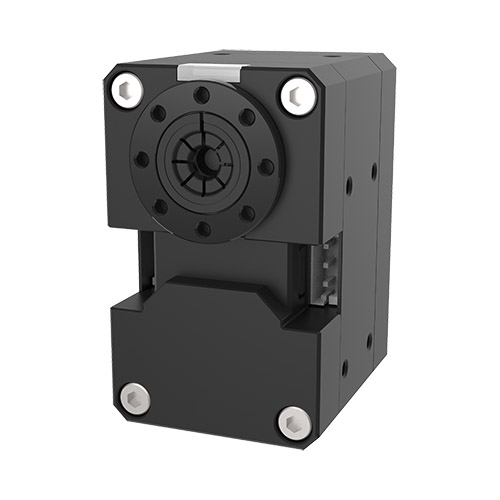





Bộ truyền động Dynamixel XH430-W210-R: tinh chỉnh hơn nữa các chuyển động của robot
Servo XH này được cung cấp bởi Robotis. Nó mở rộng tầm nhìn của nền tảng robot của bạn với hiệu suất được cải thiện, nhờ nhiều tính năng sẽ làm hài lòng các kỹ sư robot đang tìm kiếm những thách thức mới để giải quyết:
-
Sáu chế độ hoạt động
-
Điều khiển vòng kín mô-men xoắn, tốc độ, vị trí và PWM
-
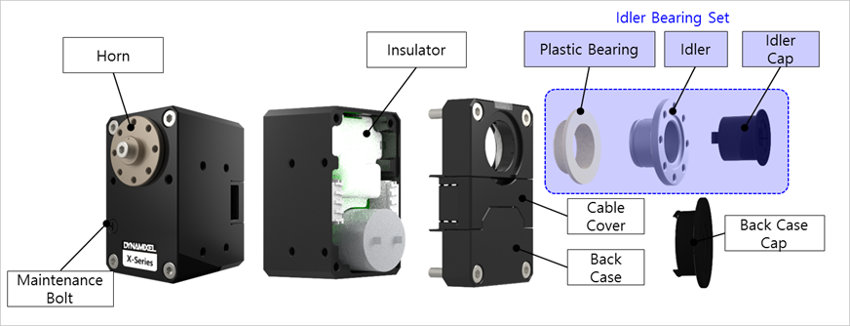
Thiết kế công thái học để tránh các kết nối kém.
-
Khả năng cắm cáp ở phía sau, do đó giảm bất kỳ rủi ro nào về việc bị kẹp hoặc mài mòn

Hệ thống sử dụng phép đo dòng điện để điều khiển mô-men xoắn và cho phép bạn truy cập vào dữ liệu quỹ đạo và trạng thái di chuyển. Với việc điều khiển theo biên dạng của servo Dynamixel của bạn, các quỹ đạo cũng trở nên mượt mà hơn.
Như thường lệ, bạn có thể sử dụng PC (Windows, Mac hoặc Linux) với USB2Dynamixel hoặc một bộ vi điều khiển phù hợp để điều khiển servo Dynamixel của bạn (xem bên dưới danh sách các thành phần cần thiết):
-
Bo mạch điều khiển OpenCM9.04-A
-
Bo mạch mở rộng OpenCM 485
-
Bộ sạc SMPS và Dây nguồn cho động cơ servo Dynamixel
-
(hoặc) Pin LBS-10 LiPo 11V cho động cơ servo Dynamixel
Bộ truyền động XH430-W210-R mới: nhiều cải tiến trong danh mục
Dòng sản phẩm XH phản ánh những tiến bộ ấn tượng của Robotis với các servo Dynamixel của họ. Dòng mới này có những cải tiến đáng chú ý về độ bền, mô-men xoắn, tản nhiệt và thậm chí cả kích thước (thiết kế nhỏ gọn hơn).