









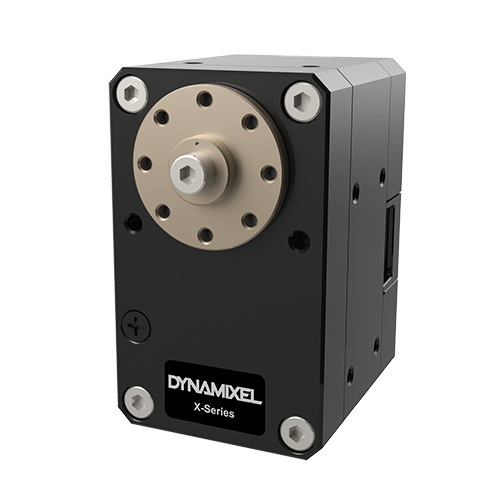







Bộ truyền động Dynamixel XH430-V350-R: kiểm soát tuyệt đối
Hoàn toàn có thể lập trình thông qua phần mềm RoboPlus – bạn có thể tải xuống bên dưới cho Windows, Linux hoặc Mac –, servo Dynamixel XH430-V350-R cung cấp mọi thứ bạn cần để sử dụng nó một cách tốt nhất. Bạn sẽ được hưởng lợi từ 6 chế độ điều khiển bao gồm PWM, cực kỳ hữu ích nếu bạn có kế hoạch chế tạo một phương tiện điều khiển từ xa. Nhiều loại vi điều khiển khác nhau cho phép bạn điều khiển servo Robotis của mình, bao gồm cả thanh USB2Dynamixel mà bạn cũng có thể mua từ trang web của chúng tôi.
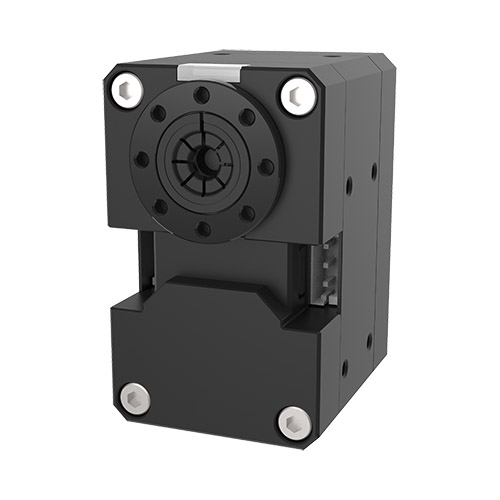
Bạn cũng có thể lắp đặt servo của mình theo ý muốn, vì có 3 tùy chọn đi dây, bao gồm một tùy chọn ở phía sau, và bạn có thể tự do lựa chọn tất cả các giá đỡ lắp đặt bạn cần từ một loạt phần cứng tương thích.
-
Bo mạch điều khiển OpenCM9.04-A
-
Bo mạch mở rộng OpenCM 485
-
Bộ sạc SMPS và Dây nguồn cho động cơ servo Dynamixel
-
(hoặc) Pin LBS-10 LiPo 11V cho động cơ servo Dynamixel
Một servo Robotis được thiết kế để bền bỉ
Các servo Dynamixel trong dòng XH có hiệu suất cao, nhưng đó không phải là tất cả: bao bì của chúng cũng rất đáng chú ý, với vỏ bằng nhựa kỹ thuật và nhôm giúp tản nhiệt tốt hơn, bánh răng kim loại 100%, các tùy chọn đi dây được nâng cấp để giảm hao mòn…














