









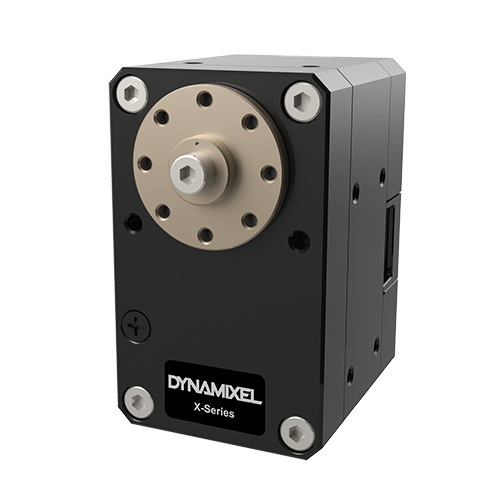







Bộ truyền động Dynamixel XH430-V210-R: xuất sắc và linh hoạt
Các động cơ servo trong dòng Dynamixel XH nhắm đến thị trường cao cấp của những kỹ sư robot khó tính nhất, những người tìm kiếm một servo hoàn toàn có thể điều khiển với 6 chế độ làm việc. Bạn đưa ra mọi quyết định: bạn có thể điều khiển tốc độ, vị trí, quỹ đạo và công suất, ngay cả ở chế độ PWM, điều này sẽ làm hài lòng những người hâm mộ các phương tiện điều khiển bằng sóng vô tuyến.
Bộ truyền động Robotis XH430-V210-R: thỏa sức sáng tạo
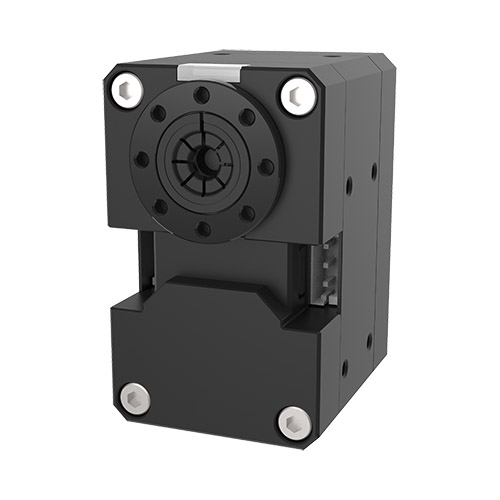
Servo Robotis XH430-V210-R đi kèm với vỏ nhôm đã được thiết kế lại để giảm ma sát vì cáp kết nối có thể được thiết lập ở ba vị trí khác nhau (giữ chúng không bị vướng khi servo đang bật). Thêm vào đó, khả năng tương thích phần cứng là tuyệt vời (khung, giá đỡ, v.v.). Chỉ cần kiểm tra bảng dưới đây.
Bảng tương thích phần cứng Dynamixel
Bạn sẽ nhận được một servo tương thích với tất cả các nền tảng robot di động hoặc có khớp nối, về phần cứng, thành phần và ý tưởng!
Như thường lệ, bạn có thể sử dụng PC của mình (Windows, Mac hoặc Linux) với USB2Dynamixel hoặc một bộ vi điều khiển phù hợp để điều khiển servo Dynamixel của bạn (xem bên dưới danh sách các thành phần cần thiết):
-
Bo mạch điều khiển OpenCM9.04-A
-
Bo mạch mở rộng OpenCM 485
-
Bộ sạc SMPS và Dây nguồn cho động cơ servo Dynamixel
-
(hoặc) Pin LBS-10 LiPo 11V cho động cơ servo Dynamixel












