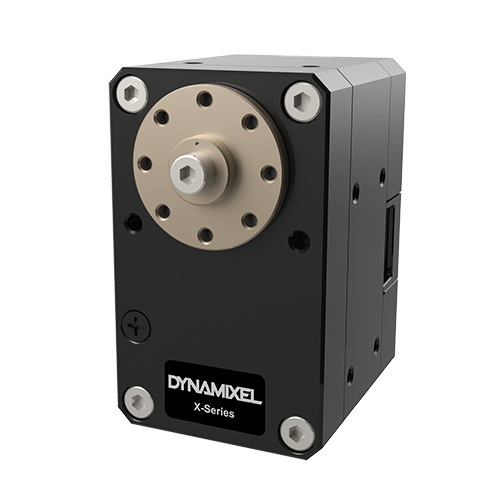





Bộ truyền động Dynamixel XD540-T270-R có tích hợp sẵn hộp số, bộ điều khiển, mạng và trình điều khiển. Giống như dòng Robotis XH, nó bao gồm các tính năng hấp dẫn đối với những người đam mê robot nghiệp dư. Bạn có thể sử dụng động cơ servo thông minh này, với mô-men xoắn đáng tin cậy, để điều khiển vận tốc, vị trí, dòng điện, mô-men xoắn và PWM.
Cũng nhỏ gọn và mạnh mẽ như các động cơ servo Dynamixel 100% có thể lập trình khác, servo này mang đến một lợi thế mới: nó có tuổi thọ cao hơn đáng kể so với dòng XH, bởi vì động cơ servo Dynamixel XD540-T270-R được hưởng lợi từ việc tăng 230% tuổi thọ sử dụng
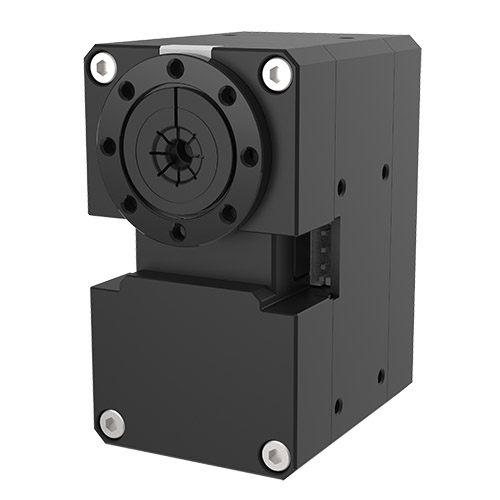
Bộ truyền động Dynamixel XD540-T270-R có cùng kích thước hình học với các servo trong dòng XH và XM – và bạn có thể kết hợp các dòng khác nhau này trong cùng một bộ lắp ráp.
Dynamixel không có sự thỏa hiệp nào về hiệu suất: mô-men xoắn mạnh mẽ, mức tiêu thụ dòng điện thấp và quan trọng nhất là sáu chế độ hoạt động và phạm vi phản hồi rộng hơn. Và Dynamixel XD540-T270-R vẫn cung cấp tất cả các lợi ích của một thành phần cấp công nghiệp.