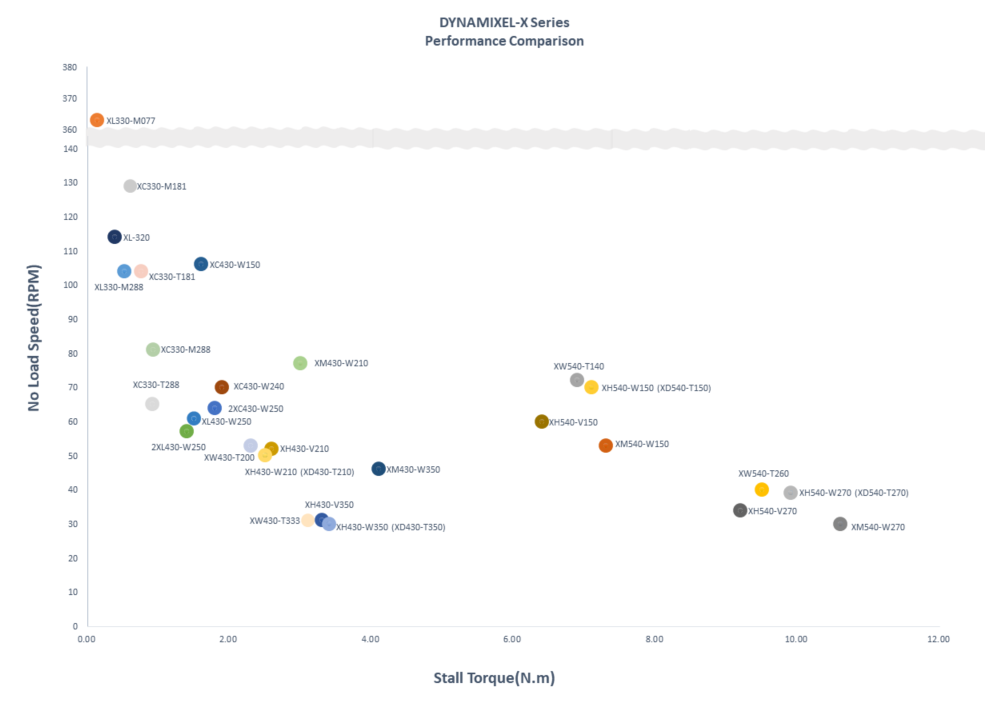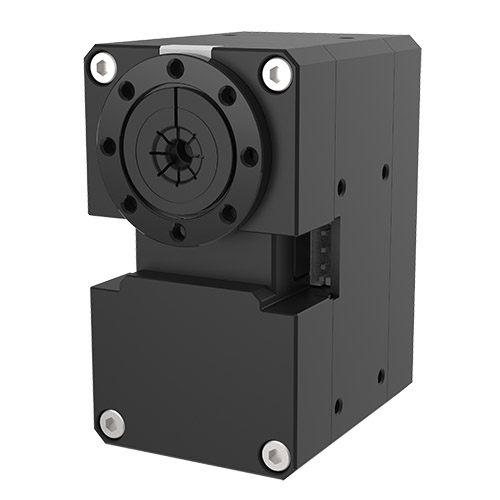





Bộ truyền động XD540-T150-R cung cấp mô-men xoắn dừng 7,10 N.m ở tốc độ không tải 70 vòng/phút. Mức tiêu thụ điện năng thấp tương đương với các dòng servo hiệu suất cao khác. Trên hết, bạn hoàn toàn có thể kiểm soát toàn bộ quy trình, với sáu chế độ vận hành và nhiều thông tin phản hồi.
Bộ truyền động Dynamixel XD540-T150-R: XD tượng trưng cho “Độ bền cực cao” Mỗi dòng servo của Robotis đều có những tính năng đặc biệt riêng: servo XW chống nước, servo XL phù hợp với ngân sách eo hẹp, trong khi servo XH là dòng mạnh mẽ nhất. Vậy “XD” nghĩa là gì? Độ bền cực cao! Với servo XD540-T150-R, và giống như các model khác trong cùng dòng, Robotis đã tạo ra một servo có tuổi thọ tối ưu. Ví dụ, mẫu XD540-T150-R, có hiệu suất tương tự XH540-W150 về mô-men xoắn và tốc độ, có tuổi thọ cao gấp ba lần (+220%).