









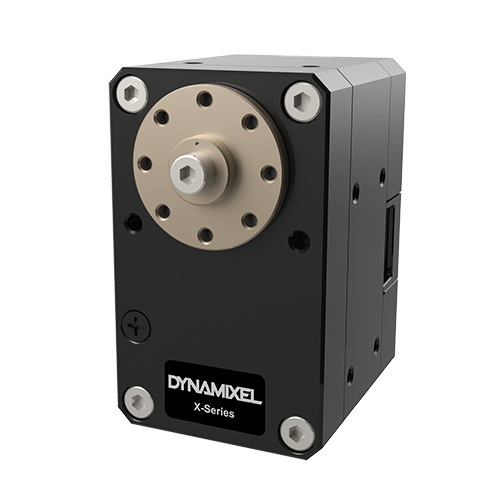


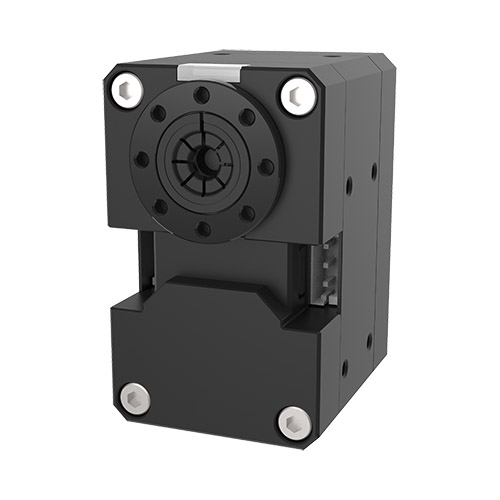





Bộ truyền động Dynamixel XD430-T210-R: Tuổi thọ tăng 250% Đối với động cơ servo DC này, Robotis đã đặc biệt chú trọng đến việc lựa chọn vật liệu, đặc biệt là đối với bánh răng. Mặc dù Dynamixel XD430-T210-R có cùng kiểu dáng với XH430 và mang lại hiệu suất tương đương, nhưng nó đảm bảo tuổi thọ tăng hơn gấp ba lần.
Đây là tin tuyệt vời cho các chuyên gia robot đang tìm kiếm những bộ phận chắc chắn có thể chịu được thử thách của thời gian, đặc biệt là cho các ứng dụng công nghiệp.
Servo có thể điều khiển đến từng thông số nhỏ nhất Một ưu điểm lớn khác của bộ truyền động Dynamixel XD430-T210-R là nó sở hữu một bộ tính năng tương tự các servo dòng X, thiết yếu cho robot chính xác, cụ thể là: 5 chế độ hoạt động: dòng điện, vận tốc, vị trí, vị trí mở rộng và điều khiển PWM Phản hồi toàn diện, từ tốc độ đến nhiệt độ vận hành, quỹ đạo và vị trí Lập trình dễ dàng hơn nhờ các tài nguyên mã nguồn mở (SDK và Dynamixel Wizard 2.0 có sẵn để tải xuống miễn phí).













