











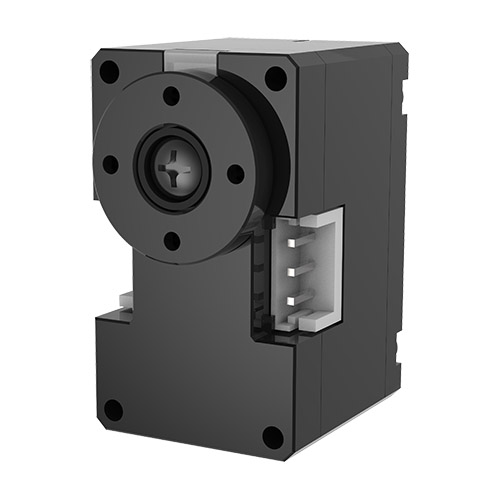







Bộ truyền động Dynamixel XC330-M288-T : một servo cân bằng tốt
Bộ truyền động dòng XC330 này phát triển mô-men xoắn hãm tối đa 1.10 N.m với điện áp đầu vào 6 V. Với điện áp khuyến nghị 5 V, con số này tăng lên 0.93 N.m. Nó có mô-men xoắn đầu ra cao hơn so với XC330-M181-T trong khi cung cấp tốc độ chậm hơn một chút, đủ thỏa đáng để đưa một nền tảng di động nhỏ đi vòng quanh đường đua.
Luôn linh hoạt về các chế độ lập trình và điều khiển, nó sẽ cho phép bạn điều khiển robot của mình một cách tự do trong khi kiểm soát tốc độ, PWM và vị trí của nó. Nó tương thích với Windows, Linux và Mac: chỉ cần kết nối nó với máy tính của bạn bằng bộ chuyển đổi U2D2 hoặc USB2Dynamixel. Bạn cũng sẽ cần phần mềm tương thích với Dynamixel: R+ Manager 2.0, DYNAMIXEL Wizard 2.0, DYNAMIXEL SDK hoặc DYNAMIXEL Workbench.
Bộ truyền động XC330-M288-T có thể được lắp ráp từ phía trước hoặc phía sau với các bộ lắp ráp tương thích. Nó cũng có thể được kết nối với một bộ khớp nối phụ.












