












Bộ truyền động Dynamixel MX-64AT
MX-64AR và MX-64AT là các động cơ servo Dynamixel mới trong dòng MX. Chúng thay thế và cải tiến động cơ servo RX-64 với bộ mã hóa tuyệt đối không tiếp xúc mới có độ phân giải 12 bit (4096 vị trí), có thể được định vị trên 360° ở chế độ khớp (trước đây là 251°), có thể điều khiển tốc độ ở chế độ bánh xe và ước tính mô-men xoắn dựa trên dòng điện.
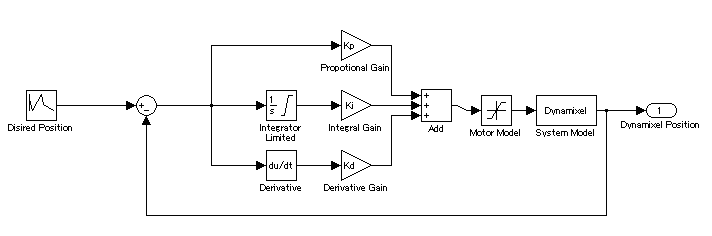
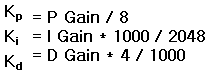
Hơn nữa, chúng được điều khiển bằng PID (tỷ lệ tích phân vi phân), các thông số có thể được đặt cho từng động cơ servo. Các giá trị cho phép nằm trong khoảng từ 0 đến 255 và các hệ số PID được sửa đổi bằng các công thức sau:
Vỏ của RX-64 cũng đã được sửa đổi nhẹ, do đó động cơ servo MX-64AT không tương thích với khớp nối HN05-N101/T101.
Động cơ servo Dynamixel MX-64AT hỗ trợ giao thức truyền thông TTL (trong khi MX-64AR hỗ trợ giao tiếp RS485) với tốc độ cao (3Mbps), tương thích với các bộ điều khiển chính CM-510, CM-530, CM-700 và OpenCM9.04. Lưu ý, điện áp hoạt động không giống với điện áp của RX-64.












